|
|
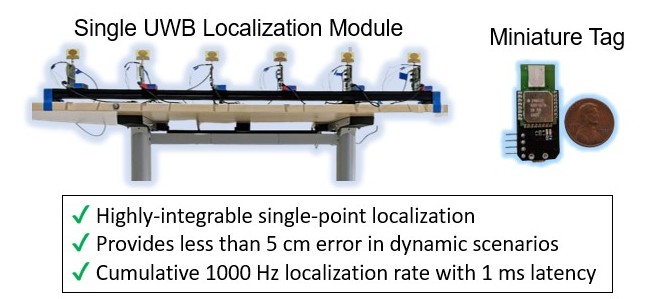
Understanding the location of ultra-wideband (UWB) tag-attached objects and people in the real world is vital to enabling a smooth cyber-physical transition. However, most UWB localization systems today require multiple anchors in the environment, which can be very cumbersome to set up. In this work, we develop XRLoc, providing an accuracy of a few centimeters in many real-world scenarios. This paper will delineate the key ideas that allow us to overcome the fundamental restrictions that plague a single anchor point from localization of a device to within an error of a few centimeters. We deploy a VR chess game using everyday objects as a demo and find that our system achieves 2.4 cm median accuracy and 5.3 cm 90th percentile accuracy in dynamic scenarios, performing at least 8× better than state-of-art localization systems. Additionally, we implement a MAC protocol to furnish these locations for over 10 tags at update rates of 100 Hz, with a localization latency of ∼1 ms.
Most UWB systems rely on ranging measurements between the mulitple localization modules (or anchors) and the tags. This is commonly done by measuring the time of arrival of packets at each of the devices and measuring either the time it takes for the packet to travel among the two nodes (a.k.a. two way ranging, TWR) or the additional time taken for the packet to arrive at different anchors (a.k.a time difference of arrival, TDOA). More recently, few works are also leverage difference phase across various UWB receivers to measure the angle of arrival of a transmitted signal from the tag. Subsequently, there are three ways to localize a tag using UWB measurements: via circle-intersection using TWR measurements, via hyperbola-intersection using TDoA measurements or via line-intersections using AoA measurements.
However, all of these systems assume a diverse placement of the anchor modules to provide tens of centimeters of accuracy. Placing multiple anchors all over a space demands extensive deployment efforts -- routing the required power and network resources, anchoring devices to walls and ceilings -- and additional maintainence of these devices. These efforts curtail the widespread adoption of UWB localization solutions. XRLoc instead seeks to circumvent these challenges by developing the UWB system which can localize off-the-shelf UWB tags within a few centimeters of accuracy from a single localization module. This localization module, sized less than a meter in length, can be easily incorporated into television sets and soundbars or deployed on a single wall to provide room-scale cm-accurate localization to hundreds of tags.